知乎上关于这章的整理——处理器体系结构:基础、处理器体系结构:顺序实现、处理器体系结构:流水线已相当详尽,故觉得没有必要自己做整理了。于是接下来的内容就以泛泛而谈的形式展现。
本章节讨论的问题是如何设计处理器的体系结构来实现汇编指令。 主要可以分为三个部分:1)设计了Y86-64指令集及其编码+介绍了逻辑设计和HCL;2)设计了顺序实现的处理器;3)设计了流水线实现的处理器。 接下来的泛泛而谈也分别从这三个角度出发。
Y86-64:为了便于后续讨论,第四章首先将x86-64指令集简化为Y86-64指令集(本书独创的指令),并提出一些额外的约定,如整型操作数均为8字节、内存只能表示为Imm(rb)形式等。 然后对于所有的Y86-64指令进行编码,比如halt编码成0x00。
HCL:为了描述硬件的输入和输出,本章又约定了一种描述方法,称之为HCL(hardware control language)。其写法和C基本一致,如: a&&b、a||b、!a。特别的,bool s1 = code in {2,3}含义是bool s1 = (code == 2 || code == 3)
组合电路:组合电路(Combinational Circuits)由很多逻辑门组合而成,不储存信息。当输入发生变化时,输出会很快相应变化。 其中多路复用器(Multiplexor,MUX)使得s为1时输出a,s为0时输出b,HCL表达式为bool out = (s && a) || (!s && b)
时钟:为了协调CPU各元件工作,需要一个在高电平和低电平之间周期变化的时钟(clock),其周期成为时钟周期(clock cycle)。 时钟寄存器(寄存器)(clocked register):保持输出不变,直到时钟变成高电平才会更新信号,比如输入为x、时钟低电平、输出为y,当时钟改为高电平后,输出才会变成x。Y86-64处理器使用时钟寄存器来保存程序计数器(PC)、条件代码(CC)和程序状态(Stat)。 寄存器文件(register file)与内存(memory):写入操作受时钟信号控制,只有当时钟为高电平时,才能写入;但是读取操作不受时钟控制。
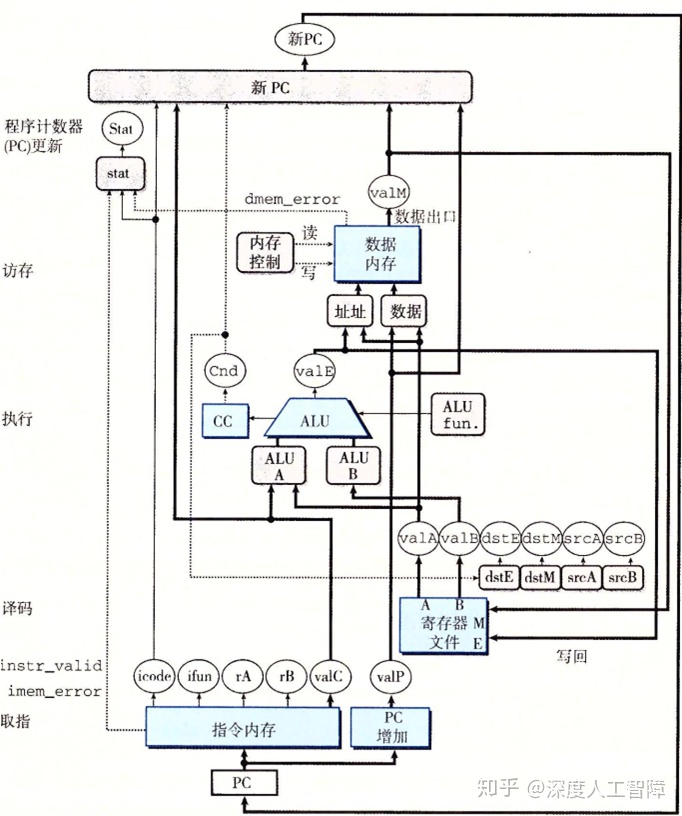
处理一条指令可以分为以下几个阶段(就直接复制黏贴了):
顺序实现的处理器就是指:一条指令完全执行完毕后(更新完PC后),才执行下一条指令(当时钟变成高电平后,PC、CC、寄存器文件和内存才会完成更新)。直观上就是按照汇编程序的顺序,一条执行完再执行下一条指令。 通过选择合适的时间周期(时间短会使得指令来不及完成,时间长浪费时间),可以使在一个时间周期内完成一条指令。
显然顺序实现的处理器效率低,当一条指令在后面阶段时,前面阶段就空闲了。好比大家排队买饭要依次经过蔬菜、肉、饭、汤四个窗口,现在要求小A买完汤后,小B才能开始买蔬菜。 很多细节就不涉及了,最后贴一张别人扫描的顺序实现的图:
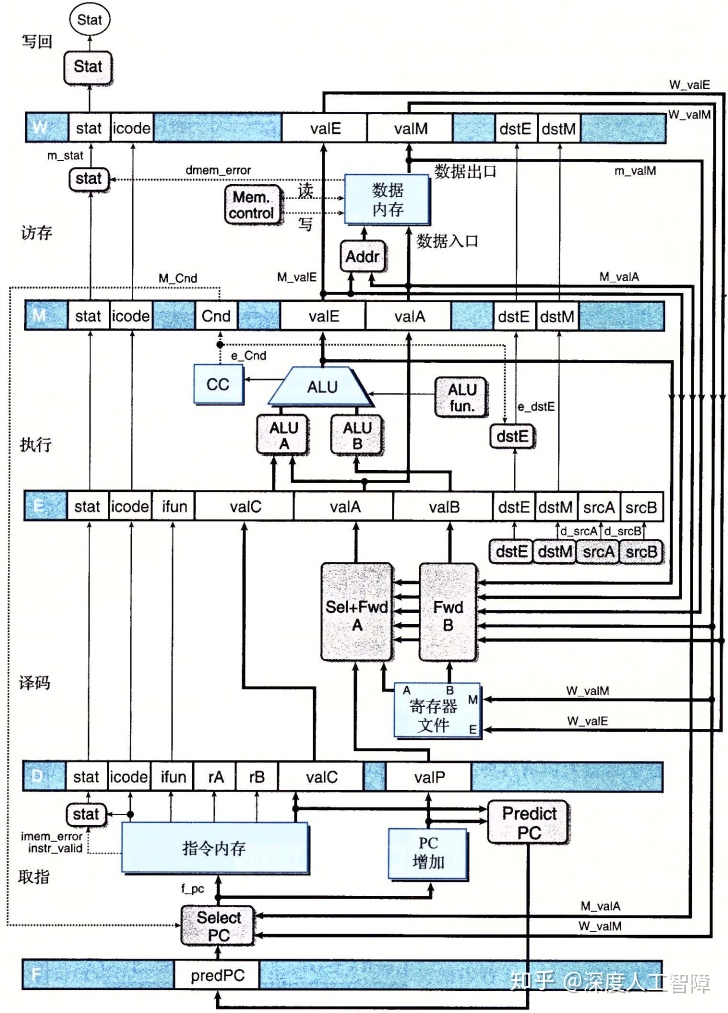
前面说到食堂排队买饭的故事。现在小A在买肉的时候,小B就可以过去买蔬菜了,显然着效率提升了几倍。而这就是流水线(pipeline)。要使流水线效率高,就要使流水线尽可能的满。
csapp介绍的流水线便是五级流水(five-stage pipeline),通过五个流水线寄存器(Pipeline Register)将指令处理划分为五个阶段——fetch, decode, execute, memory and write back。
我们之前考虑流水线时,只有当指令之间是不相关时才是完全正确的。但是真实系统中,指令之间存在两种形式的相关:数据相关(Data Dependency),下一条指令会用到这条指令计算出来的结果; 控制相关(Control Denpendency),一条指令要确定下一条指令的位置。这些相关可能会导致流水线产生计算错误,称为冒险(Hazard),包括:数据冒险(Data Hazard)和控制冒险(Control Hazard)。 而本章后续的大量篇幅就在讨论解决冒险的方法。在这也略作介绍。
流水线寄存器有三个状态:stall、bubble、normal。stall意味着即便电平变高,输出仍然不变。bubble意味着寄存器状态设置成某个固定的复位配置,得到一个等效于nop指令的状态,相当于取消该指令接下来的运行。
为了解决这两个流水线冒险,我们需要综合使用暂停(stalling)和转发(forwarding)两个方法来解决问题。stalling就是在一条指令后加入bubble,也就意味着下一时钟周期的某些寄存器会处于bubble状态。 比如,对于jump分支预测错误,需要设置下一个时钟周期的D寄存器和E寄存器为bubble状态。forwarding就是直接把一个流水线阶段的数据传送到另一个阶段。 一般都是利用forwarding来解决hazard,因为这样不会浪费时间。但是遇到load/use hazard时,需要利用load interlock(加载互锁,先stall一下,再forward)来解决。
本章还花了一点时间讨论了异常处理问题,主要原则就是在异常指令之后的指令都不会修改程序员可见状态(看上去异常指令后面的指令没有被执行,其实会有被fetch之类的)。大体思路是,在write-back阶段处理异常(因为流水线处理器按顺序处理指令,最先到达write-back阶段的异常就是最先出现的异常),出现异常后CC与data memory拒绝修改(可保证异常指令之后的指令不会修改内存和条件码)等。
泛泛而谈就差不多如上罢了,具体整理就看看那个知乎的链接就好了。总的来说这章细节很多,自己肯定有许多细节没有搞清楚。本章节在CMU的ICS+课程是不讲的。而且这章甚至为了介绍处理器体系结构而创造了Y86-64指令集,也没有掌握该指令集的必要。个人觉得这章许多内容有点冗杂,同一个知识点讲述不集中,不过作为五级流水的初步了解还算是不错。 处理器体系结构在《计算机组成与设计:硬件/软件接口(第五版)》第四章同样也进行了介绍,动态调度的tomasulo算法在《计算机体系结构:量化研究方法(第六版)》第三章有详细介绍。最后贴一张别人扫描的流水线实现的图: